Ini adalah ringkasan mengenai Classical Planning, sebagai tugas dari mata kuliah Intelegensia Semu.
Planning adalah tindalan membuat rencana untuk mencapai goal yang dibutuhkan. Dalam hal ini, berarti komputer membuat rencana untuk menyelesaikan suatu problem agar bisa mencapai goal state yang diinginkan. Dalam Classical Planning, kita berasumsi bahwa yang bisa berubah hanyalah faktor – faktor dalam problem, sehingga tidak perlu memikirkan faktor diluar yang ada di problem. Asumsinya adalah lingkungan deterministik, bisa diobservasi, dan statik / hanya merespon pada tindakan kita.
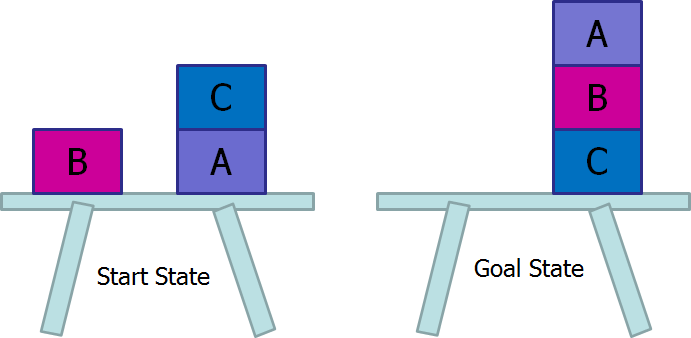
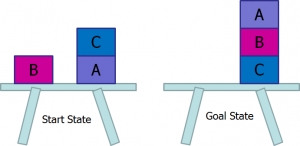
Untuk contoh planning ini, kita akan menggunakan problem Block World. Asumsikan ada sebuah meja yang menampung beberapa balok, dan kita adalah sebuah tangan robot yang bertugas memindahkan balok – balok tersebut menjadi goal state yang diharapkan. Contohnya adalah sebagai berikut:
Sebagai tangan robot, kita memiliki beberapa fungsi, yaitu sebagai berikut :
Operator :
•UNSTACK(A,B) : Mengambil balok A dari atas balok B. Tangan harus kosong dan balok A harus clear dan berada diatas balok B.
•STACK(A,B) : Menaruh balok A diatas balok B. Tangan harus memegang balok A dan balok B harus clear.
•PICKUP(A) : Mengambil balok A dari atas meja. Tangan harus kosong dan balok A harus clear.
•PUTDOWN(A) : Menaruh balok A diatas meja. Tangan harus memegang balok A.
Kondisi:
•ON(A,B) : Balok A berada diatas Balok B.
•ONTABLE(A) : Balok A berada diatas meja.
•CLEAR(A) : Tidak ada apa – apa diatas balok A.
•HOLDING(A) : Tangan sedang memegang balok A.
•ARMEMPTY : Tangan tidak memegang apa – apa.
Ada 2 cara yang dapat digunakan untuk membuat planning, yaitu :
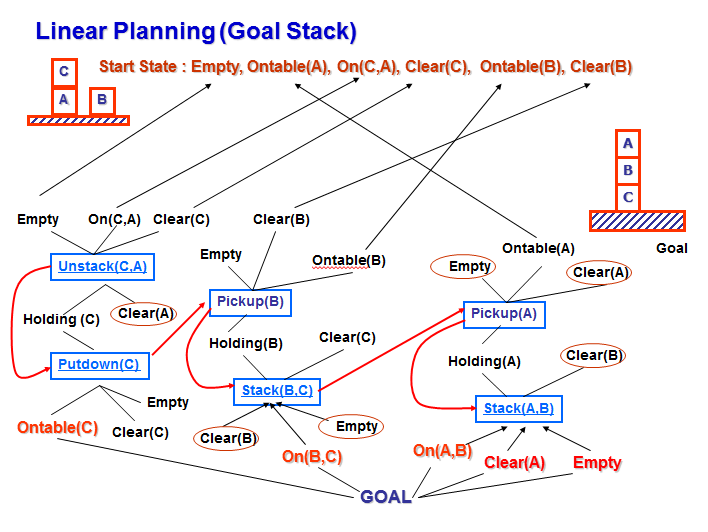
1. Linear Planning (Goal Stack Planning)
Di cara ini, kita melihat dari goal state yang dituju, satu per satu bagiannya dianalisa untuk menentukan operator yang harus digunakan, kondisi yang diperlukan, dan hasil dari operator tersebut.
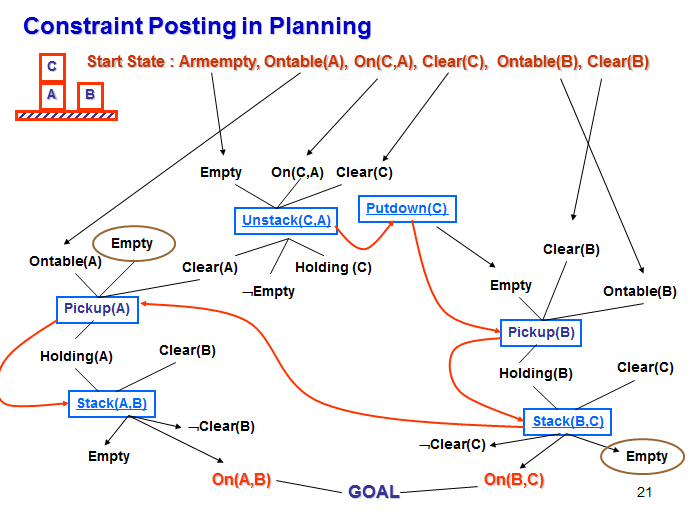
2. Non-Linear Planning (Constraint Planning)
Cara ini muncul karena adanya pertimbangan dari cara pertama, seperti
– Ada interaksi antar subgoal
– Operator untuk menyelesaikan satu subgoal bisa mengganggu solusi subgoal sebelumnya.
– Kebanyakan problem memerlukan rencana yang kompleks dimana beberapa subgoal dikerjakan sekaligus
Ada 5 operator dalam Non-Linear Planning, yaitu :
1.Step addition – Penambahan langkah baru
2.Promotion – Meletakkan satu langkah agar harus dilakukan sebelum langkah lain
3.Declobbering – Menyisipkan satu langkah baru (L2) antara 2 langkah (L1 dan L3) yang sudah ada, sehingga langkah tersebut bisa memenuhi prekondisi L3, yang mungkin sudah digagalkan oleh L1
4.Simple establishment – Meletakkan langkah awal yang sudah berisi value.
5.Separation – Melarang penempatan value tertentu pada variabel
Backlink : www.binus.ac.id